

Urządzenie o nazwie „System G-EO”, a w skrócie G-EO to nowoczesny robot służący do rehabilitacji chodu, pracujący w technologii „end-effector”, wykorzystywany w usprawnianiu osób z zaburzeniami w obszarze funkcjonowania kończyn dolnych.
Zrobotyzowane urządzenia wykorzystywane do rehabilitacji i usprawniania to coraz częściej rzeczywistość, która otacza zarówno nas – fizjoterapeutów jak i naszych pacjentów. Nie sposób nie poddać się temu nurtowi zwłaszcza kiedy prowadzi nas w dobrą, efektywną stronę.
Korzystanie z technologicznie wspomaganej rehabilitacji to przyszłość, od której nie sposób uciec. Możemy się jej obawiać ze względu na złożoność funkcji i dostępnych parametrów aplikowanych pacjentom przez urządzenie, może nas przerażać i przygniatać ogromem możliwości i wielkością spektrum działania, ale nie możemy przejść obojętnie obok szansy na poprawę funkcjonowania pacjenta, który nam zaufał i pokłada nadzieję w tym, że będziemy potrafili zaproponować mu usprawnianie na najwyższym poziomie. Wychodząc z tego założenia jako fizjoterapeuci musimy być otwarci na nowoczesne technologie i robotyzację, która wkracza do sal gimnastycznych i gabinetów rehabilitacyjnych.
Urządzenie G-EO to z pewnością robot zasługujący na uwagę, mający do zaproponowania ciekawe rozwiązania. Prześledźmy jego możliwości i efekty działania.
Technologia „end-effector” oznacza, że ruch kończyn dolnych inicjowany jest za pomocą programowalnych podstaw pod stopy, a prowadzenie kończyny wymaga jedynie dystalnego zabezpieczenia. Konfiguracja i regulacja urządzenia jest nieskomplikowana, dlatego też średni czas dostosowania do pacjenta wynosi około pięciu minut. W rehabilitacji chodu z wykorzystaniem robota stanowi to istotny czynnik w skutecznym przebiegu terapii i w znaczący sposób zmniejsza obciążenie fizjoterapeutów. Prowadzone badania kliniczne wykazały, że reedukacja chodu oparta o technologię „end-effector” jest najbardziej skuteczną strategią w przywracaniu zdolności chodzenia.
W przypadku G-EO do jej głównych zalet należą:
- Wzorzec chodu zbliżony do naturalnego.
- Możliwość treningu chodu po powierzchni płaskiej do przodu.
- Możliwość treningu chodu po schodach w górę i w dół.
- Bezpieczna forma terapii, szczególnie przy spastyczności.
- Brak ryzyka zahaczania opadającą stopą o podłoże.
- Łatwiejszy dostęp do kończyn dolnych pacjenta.
- Czujniki siły w podstawach stóp oraz informacja o obciążeniu.
- Szybkie podpięcie pacjenta do urządzenia.
- Sprawne dopasowanie ustawień.
Główne cele pracy robota to:
- nauka lub reedukacja chodu polegająca na przemieszczaniu nóg pacjenta według ustalonego wzorca, który określa programowanie nastawiane przez fizjoterapeutę;
- usprawnianie kończyn dolnych (wybór programów pracy aktywnej z/bez wsparcia robota, doskonalenie umiejętności wykonywania pracy naprzemiennej);
- korygowanie postawy ciała pacjenta poprzez konieczność pionizacji ciała w trakcie odbywania terapii.
BUDOWA
Budowa tego urządzenia może w pierwszej chwili wzbudzać respekt. Jest to robot duży, zajmujący sporą powierzchnię, ale pracę jaką wykonuje również można zaliczyć do kategorii „duża”.
Na taką jego budowę składa się:
– stabilna rama odciążająca z uprzężą dla pacjenta oraz system ruchu środka masy,
– elektrycznie napędzane mechanizmy, dzięki którym kończyny dolne pacjenta wprawiane są w ruch (mechanika stóp),
– przestrzeń wykorzystywana podczas chodu pacjenta,
– rampa umożliwiająca bezpieczne wejście i zejście pacjenta z urządzenia (część ładunkowa rampy przeznaczona jest do wchodzenia na obszar terapeutyczny oraz bezpiecznego wjeżdżania wózkami),
– monitor na statywie służący jako feedback dla pacjenta w trakcie terapii,
– panel sterowania i kontroli w postaci komputera PC.
Ryc.1 Widok Systemu G-EO

Zacznijmy od panelu sterowania i komputera, który jest mózgiem całego robota. Oprogramowanie jest zaprojektowane w sposób przyjazny dla użytkownika, a instrukcje napisane są prostym, zrozumiałym językiem.
To tu fizjoterapeuta nastawia niezbędne parametry, które są aplikowane pacjentowi podczas terapii. Parametry obejmują takie dane jak:
– długość kroku,
– szybkość chodu,
– balans ciała w trzech płaszczyznach,
– zakres zgięcia grzbietowego i podeszwowego stopy,
– wybór opcji chodu po płaskim podłożu oraz wchodzenia i schodzenia ze schodów,
– wybór opcji terapii biernej, czynnej (aktywnej) oraz ze zróżnicowanym wsparciem robota.
Poniżej charakterystyka opisująca w jaki sposób wybór poszczególnych parametrów wpływa na indywidualizację i dostosowanie procesu terapii do stanu funkcjonalnego pacjenta.
DŁUGOŚĆ KROKU I KADENCJA
Długość kroku to parametr, który należy dobrać indywidualnie do pacjenta zwracając uwagę na jego wzrost i umiejętność chodzenia – dostępny zakres mieści się w granicach od 0 do 55 cm. Kadencja natomiast umożliwia ustawienie liczby kroków na minutę w zakresie od 0 do 70.
Regulacja tych parametrów może służyć idealnemu dobraniu długości kroku do konkretnego pacjenta, jak również zwiększaniu intensywności pracy kończyn dolnych (przy wydłużeniu kroku) jeżeli taki będzie indywidualny cel pacjenta.
Praktyka pokazuje, że w sytuacji gdy pacjentem jest dziecko warto rozpoczynać sesje od zaaplikowania krótszego kroku, celem oswojenia dziecka z nową sytuacją.
SZYBKOŚĆ CHODU
Wybór szybkości chodu mieści się w zakresie od 0 do 2,3 km/h. Jest to parametr, który ma zdecydowany wpływ na intensyfikację usprawniania.
Chód wolniejszy jest bardziej płynny, dokładniejszy, idealnie nadaje się na początek terapii.
Z czasem regulacja tego parametru powoduje większe obciążenie pracą zarówno kończyny dolne jak i cały organizm. Dzięki niemu fizjoterapeuta może wpływać na krzywą natężenia wysiłku fizycznego podczas przebiegu sesji terapeutycznej.
Im szybkość chodu jest większa, tym więcej kroków może zrobić pacjent podczas sesji. Chęć „bicia rekordu” w zakresie liczby wykonanych kroków (w przypadku dzieci) często stanowi ważny motywator do podejmowania wysiłku podczas terapii.
BALANS CIAŁA
Fakt, że podczas chodu ciało człowieka balansuje w trzech płaszczyznach – strzałkowej, czołowej oraz poprzecznej ma swoje odwzorowanie w terapii z wykorzystaniem G-EO. Oś pionowa urządzenia ustawia pionowy ruch poprzez przesunięcie odciążenia w zakresie od 0 do 5 cm., oś boczna ustawia ruch boczny za pomocą linek w zakresie od 0 do 15 cm, natomiast oś strzałkowa zmienia pozycję przednio-tylną poprzez przesunięcie pozycji podnóżków w zakresie ± 5 cm.
Dzięki mocowaniu dorosłego/dziecka na podnóżkach, zawieszeniu górnemu oraz linkom bocznym fizjoterapeuta ma możliwość wpływania na balans ciała, dobierając poszczególne parametry do prawidłowego wzorca chodu dostosowanego indywidualnie do pacjenta.
ZAKRES ZGIĘCIA GRZBIETOWEGO STOPY
Do wyboru są dwie opcje na które może wpływać fizjoterapeuta – jest to moment kontaktu pięty z podłożem oraz moment oderwania palców od podłoża tuż przed rozpoczęciem swingu stopy (oba możliwe w zakresie 10°).
Przykładowo, w sytuacji gdy pacjent ma tendencję do chodu na palcach zwiększenie zgięcia grzbietowego stopy w chwili kontaktu pięty z podłożem może w znaczący sposób wpłynąć pozytywnie na jego wzorzec chodu.
Ponadto regulacja tego parametru może istotnie wpłynąć na motorykę stawu skokowego.
CHÓD PO PŁASKIEJ POWIERZCHNI
Ta opcja jest najczęściej wykorzystywana, ponieważ pacjentom w większości zależy na reedukacji chodu, który z różnych przyczyn uległ pogorszeniu lub nauce tej umiejętności. W tej opcji robot umieszcza podnóżki w pozycji wirtualnego podłoża. Stopy pacjenta z kolei są przypięte do podnóżków.
Rodzicom małych pacjentów najbardziej zależy na wyuczeniu dzieci z niepełnosprawnością prawidłowego wzorca chodu. W trakcie trwania każdej sesji terapeutycznej powtarzanie prawidłowego wzorca ma za zadanie torować odpowiednie drogi nerwowe i niejako „zapisywać” prawidłowy schemat w odpowiednim obszarze mózgu niepełnosprawnego pacjenta.
Długość pojedynczej sesji oraz długoterminowy plan terapii gwarantuje poprawę wzorca chodu pacjenta (w zakresie zależącym indywidualnie od wielu czynników współistniejących).
Ryc.2 Widok urządzenia aplikującego pacjentowi zwykły chód po płaskiej powierzchni

WCHODZENIE PO SCHODACH
Podobnie jak w opcji chodu po płaskim podłożu mamy możliwość dodatkowego nastawienia szybkości wchodzenia, a także wysokości stopnia (w zakresie od 0 do 27 cm), co daje nam możliwość kolejnej modulacji i wpływania na intensywność odziaływania.
Na wybór tej opcji możemy pozwolić sobie w sytuacji gdy:
– pacjent dobrze radzi sobie z chodem po płaskim podłożu,
– celem usprawniania jest wzmacnianie mięśni kończyn dolnych,
– celem pacjenta jest doskonalenie umiejętności wchodzenia po schodach.
SCHODZENIE PO SCHODACH
Ta opcja podobnie jak opcja opisana powyżej wykorzystywana jest w kilku specyficznych sytuacjach, jednakże dodatkowo należy zwrócić uwagę na motorykę kolana podczas aplikowanego ruchu.
Przykładowo, jeżeli pacjent ma osłabione napięcie mięśnia czworogłowego uda oraz trudności z utrzymaniem rzepki w odpowiedniej pozycji podczas całego procesu zginania kolana, to nie należy korzystać z tej opcji do czasu uzyskania poprawy u pacjenta w tym zakresie przy zastosowaniu innych form usprawniania.
Zarówno wchodzenie jak i schodzenie ze schodów odbierane jest przez pacjentów jako bardzo intensywne oddziaływanie, niejednokrotnie trudne i męczące.
Opcje te mogą stanowić jedynie fragment całościowego usprawniania podczas jednej sesji – na przykład w konfiguracji: 10 min. chodu po płaskim, 5 min. wchodzenie po schodach, 5 min. schodzenie ze schodów, 5 min. chodu po płaskim.
W związku z tym, że robot liczy liczbę pokonanych stopni pacjent ma możliwość sprawdzenia jakie postępy czyni z sesji na sesję.
Ryc.3 Widok urządzenia aplikującego pacjentowi chodzenie po schodach

TERAPIA BIERNA
Wybór przez fizjoterapeutę tej opcji świadczy, że jego pacjent wymaga dużego wsparcia robota podczas chodu. Terapia bierna jest stosowana u pacjentów z dużą niepełnosprawnością w obrębie kończyn dolnych. Cały, prawidłowy wzorzec chodu jest inicjowany przez urządzenie, natomiast pacjent biernie mu się poddaje pozwalając na prowadzenie ruchu.
W trakcie jednej sesji terapeutycznej urządzenie wielokrotnie, biernie wykonuje naprzemienne zginanie i prostowanie w poszczególnych stawach kończyn dolnych przyczyniając się do usprawniania tych części ciała. Pamiętając, że pacjent podczas terapii jest w pozycji wyprostowanej uzyskujemy tym samym jego pionizację w warunkach dynamicznego ruchu kroczącego.
Nawet pacjent, który nie chodzi samodzielnie i większość czasu spędza w wózku, dzięki G-EO ma możliwość doznawania formy ruchu zbliżonej do prawidłowego chodu. W tej sytuacji oddziaływanie na poszczególne układy wewnętrzne (w tym krążeniowy, oddechowy, kostny) jest równie ważne jak usprawnianie poszczególnych mięśni i nauka prawidłowego wzorca chodu.
TERAPIA CZYNNA
Podczas sesji chodu pacjent wykonuje naprzemienne ruchy kończyn dolnych jak podczas normalnego chodu – sam inicjuje ruch i dalej kroczy sam.
Fizjoterapeuta ma możliwość regulacji ustawień wielu parametrów w obrębie terapii czynnej. Ponieważ pacjent jest upięty w sandałach znajdujących się na podnóżkach, wykonanie ruchu jest trudniejsze i wymaga większego wysiłku ze strony pacjenta.
Ryc. 4 Widok monitora fizjoterapeuty podczas ustawiania terapii czynnej (aktywnej)
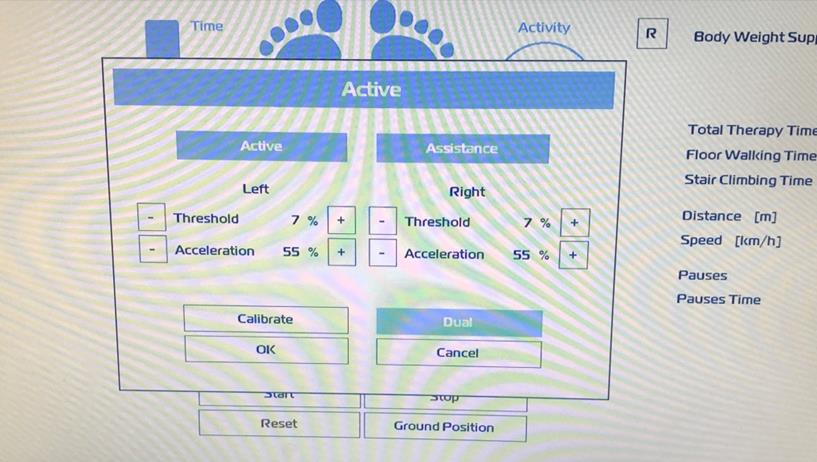
TERAPIA ZE WSPARCIEM ROBOTA
Dzięki nastawieniu tej opcji istnieje możliwość płynnej regulacji wielkości wsparcia ze strony robota dla jednej lub dla obu kończyn dolnych. Nastawienie procentowe „progu” skutkuje tym, że robot dopiero od jakiegoś momentu włączy się z pomocą, natomiast nastawienie „przyspieszenia” określa jakie szybkie ono będzie.
Ustawienie siły określa siłę niezbędną do samodzielnego poruszania podnóżkami przez pacjenta. Jeżeli ustalona wartość jest niska, to siła wymagana do poruszania podnóżkami będzie niska. Im wyższa ustalona wartość siły, tym wyższa siła niezbędna do poruszania podnóżkami.
Wzmocnienie pomaga pacjentowi w przypadku przerywanej aktywacji, przyspieszając i wygładzając ruch. Jeżeli pacjent potrafi ćwiczyć z ustaloną szybkością i własną aktywacją ruchu, wówczas System G-EO pomaga mu. Im wyższa ustalona wartość, tym wyższe wsparcie urządzenia.
Oczywistym jest, że każdy pacjent funkcjonuje inaczej, dlatego dzięki takim rozwiązaniom dla każdego pacjenta może być nastawiony zestaw parametrów, które będą indywidualnie oraz idealnie dobrane do jego potrzeb i możliwości.
FEEDBACK DLA FIZJOTERAPEUTY W TRAKCIE TERAPII
W trakcie usprawniania za pomocą G-EO fizjoterapeuta na bieżąco uzyskuje informacje z monitora komputera w zakresie nastawianych parametrów, które obejmują:
– pokonany dystans,
– uzyskaną prędkość,
– czas terapii,
– liczbę kroków/pokonanych schodów,
– wykres aktywność pacjenta,
– wielkość obciążenia poszczególnych obszarów stóp,
– wszystkie szczegółowe parametry nastawiane w trakcie bieżącej sesji.
Czytelny feedback stanowi adekwatne narzędzie do monitorowania przebiegu sesji oraz umożliwia bieżącą reakcję fizjoterapeuty.
FEEDBACK DLA PAPCJENTA W TRAKCIE TERAPII
Pacjent ma możliwość na bieżąco obserwować swoje osiągnięcia na monitorze telewizora:
– wielkość aktywności w postaci kolorowego wykresu kołowego,,
– liczbę wykonanych kroków/ pokonanych schodów,
– czas terapii,
– wielkość obciążenia poszczególnych obszarów stóp.
Z praktyki wynika, że zarówno czas terapii jak i liczba kroków/schodów mogą stanowić motywator do dalszego wysiłku i „bicia rekordu” co przekłada się na większe zaangażowanie pacjenta w terapię (zwłaszcza dzieci).
W sytuacji gdy pacjentem jest dziecko z niepełnosprawnością intelektualną zamiast danych szczegółowych terapii fizjoterapeuta ma możliwość wyboru bajek, muzyki lub innych atrakcyjnych dla dzieci nagrań, które prezentowane są na monitorze telewizora. Stanowią one:
– świetny motywator dla niepełnosprawnego intelektualnie dziecka,
– formę nagrody za dobre zaangażowanie podczas sesji,
– sposób na umilenie czasu trwania terapii.
RAPORTY
W formie wykresów fizjoterapeuta otrzymuje informacje w zakresie:
– czasu poszczególnych sesji,
– liczby kroków,
– długości kroków,
– liczby pokonanych schodów,
– prędkości chodu,
– liczby odbytych terapii,
– pokonanego dystansu.
Sesja każdego pacjenta jest automatycznie zapisywana w pamięci komputera i służy w dalszej kolejności do opracowywania statystyk z przebiegu terapii, a także do analiz, ewaluacji i wyciągania wniosków.
Jeżeli pacjent znajduje się już w bazie danych, jego dane można w każdej chwili przywołać.
Aby szybko odnaleźć pacjenta, można posłużyć się funkcją filtrowania bazy danych.
INDYWIDUALNE WYPOSAŻENIE PACJENTA
Wyposażenie indywidualne obejmuje:
– kamizelki odciążające do podwieszenia pacjenta (dostępne są w rozmiarach S, M, L wraz z rozbudowaną regulacją),
– sandały (dla dzieci i dla dorosłych),
– ortezy (tzw. supporty dla dzieci i dorosłych stosowane u osób z dużymi wadami w obrębie stawu kolanowego).
Ryc. 5 Widok kamizelek wykorzystywanych do podwieszenia pacjenta

Ryc. 6 Widok ortez (supportów) wykorzystywanych do terapii

ROTACJA STOPY
Urządzenie umożliwia ustawienie stopy pacjenta w rotacji zewnętrznej.
Opcja ta jest bardzo przydatna w sytuacji gdy pacjent ma tendencje do ustawiania stóp do wewnątrz. Utrzymanie stóp w rotacji zewnętrznej przez cały czas trwania sesji czyli 20-30 min. może w efekcie znacząco wpłynąć na korekcję ich ustawienia w przyszłości.
Ryc. 7 Ustawienie stóp w rotacji zewnętrznej


POSTAWA CIAŁA
W trakcie trwania sesji terapeutycznej pacjent jest spionizowany i znajduje się w warunkach dynamicznego ruchu kroczącego.
Pionizacja jest możliwa dzięki podwieszeniu pacjenta w kamizelce, mocowaniu za pomocą dodatkowych taśm mocujących oraz umocowanej poduszce ustawianej indywidualnie za pacjentem i umożliwiającej podparcie kręgosłupa.
Dodatkowy efekt korygujący postawę można uzyskać stawiając przed pacjentem lustro korekcyjne zachęcając pacjenta do utrzymywania prawidłowej postawy ciała w trakcie trwania całej sesji.
Ryc. 8 Pionizacja ciała i korekcja postawy

INDYWIDUALIZACJA
Różnorodność możliwości wykorzystania urządzenia G-EO oraz wyboru oferowanych opcji i nastawień powoduje, że jest ono w stanie sprostać zindywidualizowanym potrzebom i możliwościom pacjentów.
Robot pozwala na wprowadzanie zmian trajektorii ruchu w czasie rzeczywistym. Dokonane zmiany mogą dotyczyć bieżącej terapii lub być zapisane jako rekomendowane do kolejnych sesji.
WSKAZANIA
G-EO może być wykorzystywane w terapii zarówno dzieci jak i dorosłych.
Mogą z niego korzystać:
– pacjenci z różnym stopniem niepełnosprawności w obrębie funkcjonowania kończyn dolnych,
– pacjenci neurologiczni (MPD, udary, urazy czaszkowo-mózgowe, SM, choroba Parkinsona, paraplegia, hemiplegia),
– pacjenci z chorobami kostno-stawowo-mięśniowymi (urazy ortopedyczne, endoprotezy stawu biodrowego i kolanowego),
– pacjenci z wadami wrodzonymi i nabytymi,
– osoby ze współistniejącą niepełnosprawnością intelektualną.
PRZECIWWSKAZANIA
Jak każde urządzenie, tak i G-EO posiada listę przeciwwskazań do stosowania.
Są to:
– waga ciała powyżej 150 kg.,
– wzrost powyżej 2 m.,
– niestabilne lub niezrośnięte złamania,
– ciężka osteoporoza,
– znaczna asymetria w długości kończyn (bez zaopatrzenia ortopedycznego korygującego różnice),
– ortostatyczne problemy z krążeniem,
– schorzenia skóry utrudniające wykonanie terapii,
– ciąża,
– w przypadku chorób psychicznych lub dysfunkcji neurotycznych wskazane jest indywidualne podejście i decyzja lekarza kierującego.
CZAS TRWANIA ZABIEGU
Czas trwania sesji terapeutycznej jest uzależniony od potrzeb i możliwości pacjenta oraz celów usprawniania.
Ekran monitora dla pacjenta oraz fizjoterapeuty posiada wizualizację upływu czasu w interwałach 20 minut (różnica uwidaczniana jest co minutę). Takie zobrazowanie upływającego czasu jest czytelne zwłaszcza dla dzieci i osób z niepełnosprawnością intelektualną.
Optymalny czas terapii to 20-30 min. jednakże warto rozpoczynać terapię od czasu krótszego, stopniowo go wydłużając.
Podczas terapii dzieci, krótszy czas trwania terapii na początku powoduje lepsze zaakceptowanie przez pacjenta takiej formy usprawniania.
BEZPIECZEŃSTWO
Urządzenie spełnia wymogi bezpieczeństwa, a instrukcja obsługi w języku polskim jest czytelna i pomocna.
W sytuacji wypięcia się podnóżków lub jakichkolwiek nagłych zdarzeń urządzenie automatycznie wyłącza działanie zatrzymując się.
Dostępne są 3 przyciski bezpieczeństwa (2 dla pacjenta oraz 1 dla terapeuty), które w sposób natychmiastowy zatrzymują działanie urządzenia.
PODSUMOWANIE
Biorąc pod uwagę powyższą, szczegółową analizę sposobu wykorzystania Systemu G-EO należy stwierdzić, iż jest to urządzenie, którego praca jest niezwykle przydatna w usprawnianiu pacjentów z zaburzeniami w obrębie kończyn dolnych rzutującymi na sposób i jakość prezentowanego przez nich chodu.
Robot ten został zaprojektowany w taki sposób, aby wspierał rehabilitację pacjenta czyniąc ją skuteczną, efektywną, zindywidualizowaną, wszechstronną, a także atrakcyjną dla małych pacjentów oraz wspomagającą ich rozwój.
Bibliografia:
- Instrukcja obsługi G-EO System; Reha Technology for a better life
- www.brain4train.eu – Virtual reality in stroke rehabilitation as treatment as assessment tool in stroke rahbilitation – practical guide map.
- Mehrholz J.: Electromechanical-assisted gait training after stroke: a systematic review comparing end-effector and exoskeleton devices, 2012.
Autor: dr n. med. Beata Depczyńska