
Terapia chodu z wykorzystaniem Egzoszkieletu – EKSO GT/NR
Egzoszkielet Ekso GT/NR amerykańskiej firmy Ekso Bionics to przenośny bioniczny szkielet przeznaczony do użytku w celach rehabilitacji praktycznie każdego pacjenta z porażeniem lub niedowładem kończyn dolnych.
Egzoszkielet Ekso GT/NR pozwala na wykonywanie ruchów wstawania z i siadania na krześle oraz na wykonywanie chodu w sposób naturalny, z prawidłowym przenoszeniem obciążenia między kończynami. Egzoszkielet jest zasilany bateryjnie, ruchy są wykonywane za pomocą silników, co wspomaga utracone funkcje nerwowo-mięśniowe, dzięki czemu można np.:
- umożliwić ludziom po porażeniu całkowitym, z minimalną sprawnością przedramion, wykonywanie ruchów wstawania i chodzenia;
- ponownie nauczyć pacjenta prawidłowych wzorców chodu;
- wspomagać odpowiednie stawianie stóp na ziemi.
Praktyczne spojrzenie okiem fizjoterapeuty
Egzoszkielet – to dynamiczna orteza, przenośny bioniczny szkielet przeznaczony do reedukacji chodu. Wiele nowoczesnych, skutecznych robotów służących do reedukacji chodu to urządzenia stacjonarne, związane na stałe z miejscem, w którym odbywa się rehabilitacja.
Egzoszkielet „idzie”, nomen omen, krok naprzód i pomagając pacjentom w reedukacji chodu stwarza im okazję do faktycznego, realnego zdobywania przez nich kolejnych metrów przestrzeni oraz czucia się jakby chód był prawie samodzielny, naturalny. Ekso GT daje pacjentom nadzieję oraz energię aby ćwiczyć. Ta umocowana na pacjencie orteza wspiera wykonywanie ruchu i pomaga w chodzeniu.
Ale to nie wszystko, Ekso GT pomaga w wykonywaniu ruchów wstawania z krzesła oraz siadania na nim, uczy przenoszenia ciężaru ciała między kończynami, wspomaga utracone funkcje nerwowo-mięśniowe, może również spełniać funkcje treningowe.
Ryc.1 Widok Ekso GT z boku oraz z przodu


BUDOWA
Budowa robota przypomina częściowo sylwetkę człowieka:
– ma „część tułowiową” (z uchwytami do prowadzenia)
– ma obręcz biodrową (z możliwością regulacji oraz uchwytem krzyżowym)
– posiada stawy biodrowe oraz kolanowe
– ma stopy (z opcją regulacji)
– zamiast mięśni ma 2 zestawy silników (2 biodrowe, 2 kolanowe) niezbędne do wykonywania ruchów
– posiada elementy odpowiadające kości udowej i podudziu człowieka, które można dowolnie regulować (wydłużać i skracać dostosowując do długości kości pacjenta).
Ponadto Ekso GT posiada takie elementy jak:
– wsporniki i pasy służące do mocowania na kończynach dolnych pacjenta
– pasy do tułowia
– tzw. plecak, który dźwiga dwie szybkoładujące się baterie
– centrum dowodzenia w postaci kontrolera (pilota)
– klucz dynamometryczny oraz grzechotkowy.
Wyposażenie dodatkowe skompletowane w zestawie to:
– kule łokciowe
– balkonik z możliwością regulacji wysokości
– urządzenie do pomiarów oraz goniometr
– podkładka pod stopę, podnóżek, dystans piszczelowy, poszerzacz pasa udowego, podkładka pod biodro, podkładka krzyżowa/lędźwiowa/tułowia/kręgosłupa, podwieszka ramienia
– pasy przednie w różnych rozmiarach
– podwieszka tylna.
Tak bogate i zróżnicowane wyposażenie gwarantuje wiele możliwości indywidualnego dostosowania egzoszkieletu do pacjenta.
Ryc.2 Widok różnorodności wyposażenia dodatkowego Ekso GT

PRZED ROZPOCZĘCIEM TERAPII
Fizjoterapeuta przed rozpoczęciem terapii w pierwszej kolejności musi wykonać dokładne pomiary pacjenta, aby zorientować się w jaki sposób optymalnie dopasować do niego egzoszkielet.
Procedura badania jest bardzo ważna, ponieważ to od jej wyniku zależy czy pacjent będzie mógł korzystać z tej formy usprawniania.
Niewłaściwa ocena pacjenta pod kątem zasadności stosowania Ekso GT może prowadzić do obrażeń pacjenta, niskiej jakości chodu i/lub uszkodzenia robota. Dokładna ocena zakresu ruchów ma zasadnicze znaczenie przy określaniu zasadności użycia Ekso GT.
Fizjoterpeuta wykonując wywiad i badanie pacjenta wypełnia „Formularz badania pacjenta”.
Znajdują się w nim następujące informacje:
- Dane pacjenta, diagnoza, a także wzrost i waga.
- Zakres ruchomości kończyn.
- Siła mięśni kończyn.
- Spastyczność.
- Informacje szczegółowe m.in. sposób poruszania się, funkcje kognitywne, integralność skóry.
- Dokładne pomiary szerokości bioder oraz numeryczny odpowiednik w Ekso GT.
- Dokładne wymiary długości uda lewego i prawego oraz numeryczny odpowiednik w Ekso GT.
- Dokładne wymiary kości podudzia lewego i prawego oraz numeryczny odpowiednik w Ekso GT.
- Informacje obejmujące staw skokowy.
- Tabele przelicznikowe uzyskanych wymiarów na wartości Ekso GT (2 systemy metryczne).
- Tabelę zawierającą „pytania kontrolne” (informacje podsumowujące) tzw. check-listę, na podstawie której fizjoterapeuta uzyskuje odpowiedź czy pacjent może korzystać z Ekso GT, czy też informację że ta forma terapii nie jest dla niego wskazana.
Dopiero po upewnieniu się, że pacjent może korzystać z tej formy usprawniania możliwie jest wpięcie go w egzoszkielet oraz nastawienie pożądanych parametrów pierwszej sesji chodu pod nadanym pacjentowi numerem ID w urządzeniu.
Przed wpięciem należy upewnić się, że poziom naładowania baterii jest odpowiedni dla zaplanowanej sesji zabiegowej.
Bazując na uzyskanych danych oraz wykonanych pomiarach fizjoterapeuta nastawia wszystkie konieczne parametry, które są ściśle dostosowane indywidualnie do pacjenta.
WARUNKI KORZYSTANIA Z EKSO GT
Robot może być wykorzystywany do chodzenia jedynie po twardych, suchych, płaskich powierzchniach. Nie należy chodzić po pochyłościach terenu (stopień pochyłości powinien wynosić poniżej 2%). Muszą to być powierzchnie odpowiednie i bezpieczne do używania kul oraz balkonika.
Nie należy chodzić w egzoszkielecie po powierzchniach nieregularnych (kamieniach, piasku) gdyż może to spowodować utratę równowagi pacjenta oraz obrażenia.
Zakładanie pacjentowi egzoszkieletu oraz zdejmowanie go odbywa się zawsze w pozycji siedzenia na krześle. Po zakończonej sesji robot pozostaje w pozycji „siedzenia na krześle”, aż do następnej sesji z kolejnym pacjentem.
Egzoszkielet musi być odpowiednio dopasowany do każdego pacjenta, zakładany jest na ubranie, aby zapobiegać ewentualnym otarciom skóry. Podczas terapii należy na bieżąco zwracać uwagę czy robot nie uciska na kościste wypukłości i ewentualnie od razu reagować.
W razie potrzeby i zapewnienia pacjentowi komfortu wykorzystujemy elementy z dodatkowego wyposażenia dołączone do urządzenia.
WYBÓR USTAWIEŃ
- Ustawienia mechaniczne egzoszkieletu:
- szerokość bioder uzyskana podczas badania pacjenta – w przypadku pacjentów z większą tuszą pomiar uzyskany w leżeniu na kozetce różni się w efekcie od wymiaru bioder w staniu; po wstaniu w urządzeniu można ten wymiar skorygować (zmniejszyć);
- odwiedzenie bioder – ustawienie wyniku z pomiarów i tabeli;
- długość ud i podudzi uzyskana podczas badania – należy zwrócić uwagę czy staw kolanowy jest w prawidłowym ułożeniu; jeżeli nie należy posłużyć się dystansem piszczelowym lub podkładką pod stopę;
- ustawienie stopy lewej i prawej: dobór kąta (w zakresie 6°) oraz sztywności (od 1 do 4).
- Ustawienia kontrolera:
Moduł „ustawienia”:
- długość ud – wymiar tożsamy z uzyskanym podczas badania i nastawionym mechanicznie na egzoszkielecie
- długość podudzi – wymiar tożsamy z uzyskanym podczas badania i nastawionym mechanicznie na egzoszkielecie
- długość kroku
- wysokość kroku – odstęp stopy podczas fazy przenoszenia
- czas przenoszenia – długość fazy przenoszenia (swingu) każdej stopy
- czas wstawania – czas w jakim robot będzie wstawał z pacjentem z siadu do stania
- kąt zgięcia biodra pacjenta podczas stania
- kąt zgięcia kolana
- kąt względny chodu – kąt tułowia podczas chodzenia w stosunku do postawy stojącej
- poziom przesunięcia do przodu, który pacjent musi osiągnąć podczas wykonywania kroku
- poziom przesunięcia do boku, który pacjent musi osiągnąć podczas wykonywania kroku.
Moduł „opcje”:
- tryb przejścia z pozycji siedzącej do stojącej
- tryb przejścia z pozycji stojącej do siedzącej
- metoda inicjowania kroku
- dźwiękowe sprzężenie zwrotne po osiągnięciu przesunięcia do przodu i przesunięcia bocznego.
Moduł „wsparcie”:
To oprogramowanie, które stopniowo dostosowuje siły dostarczane przez Ekso GT do ciągłego rzucania wyzwania pacjentom w miarę rozwoju siły oraz ich umiejętności.
- tryb Assistance określa w jaki sposób są zasilane nogi Ekso
- tryb „Smart Assist” to kontrola trajektorii ruchu jednej lub obu kończyn dolnych w oparciu o trajektorię kroku określoną przez ustawienia
- tryb „Swing Assistance” to kontrola wolicjonalna, która zapewnia pomoc w momencie, w którym kończyna dolna porusza się do przodu podczas fazy przenoszenia.
Wszystkie powyżej opisane ustawienia mogą być zmieniane w zależności od potrzeb.
Czasem niewielka zmiana powoduje spore zmiany we wzorcu chodu pacjenta.
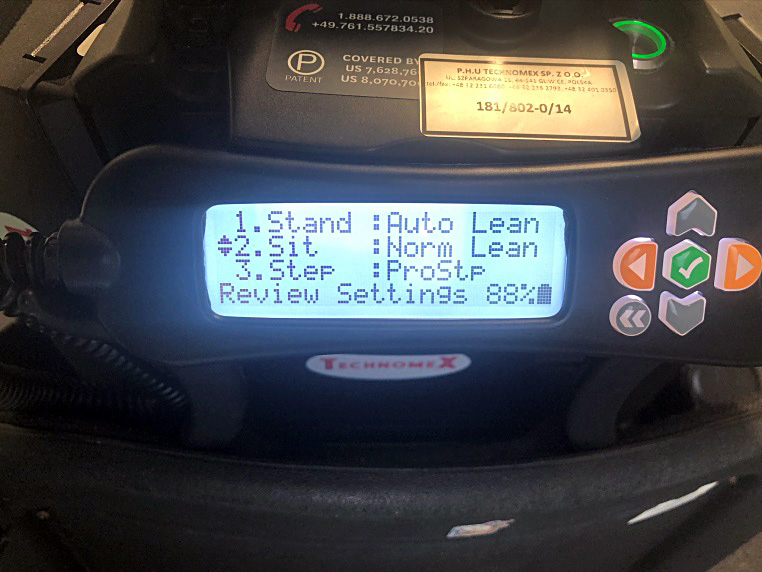
Ryc. 3 Widok kontrolera
- Funkcje PreGait
Funkcja ta jest bardzo przydatna i najczęściej wykorzystywana przed chodem z pacjentem.
Funkcja ta służy do oceny umiejętności przenoszenia ciężaru ciała z jednej nogi na drugą oraz określania wychyleń bocznych pacjenta. Przydatna może być również do nauki tych umiejętności.
Ponadto dzięki niej pacjent ma możliwość wykonywania ruchów biodrem i kolanem jednej nogi (stojąc na drugiej) pod kontrolą fizjoterapeuty – zabieg taki służy do oceny maksymalnego zakresu ruchu biodra i kolana pacjenta podczas stania, a także oswojenia pacjenta z robotem (poczuciem jego ciężaru i swobodnego sterowania ruchami).
- Przebieg sesji (chodzenie w egzoszkielecie)
Pacjent chodzący w egzoszkielecie wykorzystuje do poruszania się balkonik albo kule. Urządzenie zostało stworzone do pracy z pacjentem w systemie 1:1. Fizjoterapeuta prowadzi pacjenta w chwycie i asekuracji za tułów. Ważne jest aby instrukcje jakie wydaje pacjentowi były dla niego jasne i czytelne. Największej koncentracji wymagają momenty zmiany kierunku ruchu oraz obroty.
Robot jest zaprojektowany tak, aby był bezpieczny w sytuacji zagrożenia upadkiem – jeśli urządzenie Ekso GT wykryje problem wpływający na sterowanie jakimkolwiek silnikiem, wtedy automatycznie przejdzie do trybu bezpieczeństwa (zablokuje kolana w aktualnej pozycji i zapewni opór na biodrach).
PO ZAKOŃCZENIU TERAPII
Fizjoterapeuta po zakończeniu terapii i wypięciu pacjenta z egzoszkieletu zapisuje szczegółowe dane w karcie (pod bieżącą datą), które obejmują:
– ustawienia Ekso GT czyli nastawione indywidualne wymiary pacjenta
– wykorzystane wyposażenie dodatkowe
– ustawienia techniczne
– wybrane opcje
– zastosowane wsparcie
– statystyki bieżącej terapii
– feedback w zakresie wsparcia robota
Po wyłączeniu robota urządzenie zapamiętuje najważniejsze parametry (ustawienia oraz opcje) pod nadanym pacjentowi ID. Podczas kolejnej sesji tego samego pacjenta, robot odtwarza ostatnie zapamiętane dane, fizjoterapeuta je analizuje i ewentualnie nanosi zmiany kompletując zestaw parametrów dla pacjenta na bieżącą sesję.
FEEDBACK DLA PACJENTA
Pacjent już w trakcie sesji zauważa zmiany w swoim chodzie – synchronizuje się z egzoszkieletem. Jego nieprawidłowy na początku chód z czasem zmienia się, zbliżając się do ustawionych przez fizjoterapeutę parametrów. Pacjent odczuwa to jako łatwiejsze chodzenie (robot mniej pomaga) i chód staje się płynniejszy, a samo chodzenie przyjemniejsze.
Pacjent, od którego wymaga się dużej współpracy podczas terapii, staje się pacjentem bardzo świadomym – zdaje sobie sprawę z uzyskanych po terapii statystyk, które dla większości pacjentów są bardzo ważne i motywujące do dalszej pracy i wysiłku. Liczba przebytych kroków, czas terapii, a także wielkość wsparcia robota to informacje, które są szybką odpowiedzią pokazującą jak przebiegła sesja.
WSKAZANIA
Ekso GT jest przeznaczony do stosowania jako urządzenie do treningu chodu, w celu poprawy funkcji chodu i niezależności u pacjentów z uszkodzeniami mięśniowymi oraz neurologicznymi (udary, MPD).
Egzoszkielet może być wykorzystywany zarówno u pacjentów dorosłych jak i u dzieci przy czym minimalny wzrost dziecka to 150 cm., a maksymalna waga pacjenta to 100 kg.
PRZECIWWSKAZANIA
Tak jak w przypadku każdej terapii, również w przypadku zastosowania Ekso GT występują przeciwskazania. Są to m.in.:
– Brak skierowania od lekarza.
– Odleżyny i słaba integralność skóry w obszarach mających kontakt z urządzeniem.
– Ciężka spastyczność (Zmodyfikowana Skala Ashworth – 4).
– Niestabilny kręgosłup lub niezagojone złamania kończyn/złamania miednicy.
– Osteoporoza.
– Znaczące przykurcze.
– Niepełnosprawność intelektualna oraz zaburzenia psychiczne powodujące niezdolność do podążania za wskazówkami (brak współpracy z fizjoterapeutą).
– Kolostomia.
– Zmniejszona tolerancja stania z powodu hipotonii ortostatycznej.
– Zakrzepica żył głębokich.
– Proteza kończyny dolnej.
– Padaczka.
CZAS TRWANIA ZABIEGU
Zabieg zasadniczo składa się z trzech części:
Pierwsza część obejmuje nastawienie na robocie indywidualnych parametrów pacjenta, a także wpięcie pacjenta w egzoszkielet i dopasowanie go tak, aby był dla niego wygodny i komfortowy.
Druga część to chodzenie z pacjentem w egzoszkielecie. Trwa najdłużej i jest najbardziej intensywna, zarówno dla pacjenta jak i dla fizjoterapeuty.
Trzecia część obejmuje wypięcie pacjenta z egzoszkieletu, zapisanie uzyskanych po sesji danych i statystyk oraz dezynfekcję urządzenia.
Czas trwania takiej jednej sesji jest oczywiście uzależniony od potrzeb oraz możliwości pacjenta. Wskazane jest rozpoczynanie terapii od czasu krótszego celem przyzwyczajenia pacjenta do tej formy usprawniania. Potem fizjoterapeuta decyduje jak szybko ten czas wydłużać. Optymalnie godzina terapii jednorazowo jest czasem wystarczającym.
Trzeba zdawać sobie sprawę, że reedukacja chodu przy wykorzystaniu egzoszkieletu to taka forma usprawniania, która wymaga od pacjenta dużego zaangażowania i wysiłku. Dzięki temu jest terapią, która przynosi bardzo dobre efekty, a rezultaty widoczne dla pacjenta i fizjoterapeuty, utrzymują się jeszcze długo po zakończeniu sesji z wykorzystaniem Ekso GT.
PODSUMOWANIE
Zauważalnymi efektami terapii są:
– poprawa wzorca chodu pacjenta,
– poprawa balansu ciała i przenoszenia ciężaru na lewą i prawą stronę,
– korekcja ustawienia stóp podczas chodu,
– aktywizacja partii mięśni wcześniej mniej aktywnych ze względu na nieprawidłowy wzorzec chodu,
– poprawa postawy ciała pacjenta,
– wzmocnienie napięcia mięśni posturalnych,
– zwiększenie zaangażowania pacjenta podczas chodu kosztem zmniejszenia wsparcia robota podczas terapii (uzyskiwanie lepszych parametrów szczegółowych),
– zwiększenie pewności siebie i wiary we własne możliwości.
Pacjenci biorący udział w terapii z wykorzystaniem Ekso GT – zapytani dlaczego decydują się na reedukacje chodu z wykorzystaniem egzoszkieletu odpowiadają, że przede wszystkim właśnie ze względu na efekty terapii, które widzą zarówno oni jak i ich rodziny.
Myślę, że to najlepsza rekomendacja dla przyszłych pacjentów oraz ich fizjoterapeutów.
Bibliografia:
- Ekso GT zrobotyzowany egzoszkielet z modułem SmartAssist – Instrukcja obsługi; Ekso Bionics 2016
- www.technomex.pl
Autor: dr n. med. Beata Depczyńska